
MaxK
Member

I can do another trend with increased sample rate if that would help.
OK. Let's try to use increased PV sample
I can do another trend with increased sample rate if that would help.
The pilot valve uses 3 - 15 psi of instrument air to control the larger valve. The larger (Control) Valve modulates the flow of oil
@drbitboy, Rube Goldberg would be proud.
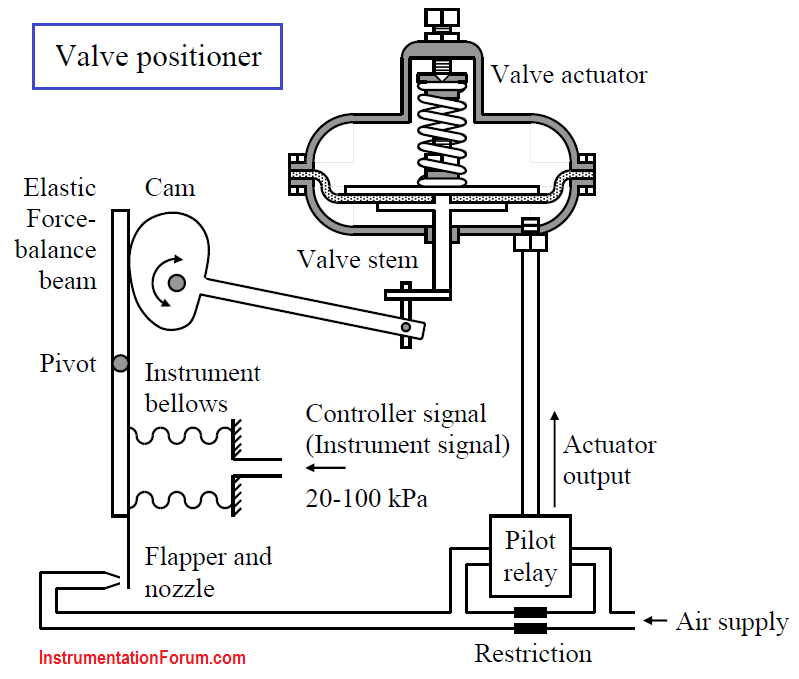
If there is a pilot valve downstream of the current-to-pressure transducer and upstream of the oil control valve, then it might be a pneumatic valve positioner (see image below; source here). A valve positioner's job is to ensure any friction or sticking (stiction) in the the final control element ([Valve Actuator] below) does not prevent its position from matching the 3-15PSI input signal, which signal is coming from the SLC PID and the I-to-P transducer.
However, if the linkages in the valve positioner are worn, then the positioner adds hysteresis (backlash) into the system. One possible, possible (and temporary) solution might exist if the valve postioner has a bypass lever. A valve positioner bypass would send the [Controller Pressure] directly to the [Actuator Output], taking the [Pilot Relay] and its worn positioning linkages out of the process. The I-to-P transducer's output pressure would then directly control the [Valve Actuator] position, which would only improve the situation if any stiction in the final Valve Actuator has less of an effect than any backlash in the Valve Positioner mechanism.
One problem with this is that OP said there is no feedback of the valve position, so maybe the pilot valve is not a valve positioner. Or it could be that OP means there is no available electronic feedback of the valve position to the SLC.
That's a lot of IFs ...

Believe it or not, it can be a broken ring on the spring, even often these are as big as a suspension spring of a car they do break, had many of them, if the break is just one coil from either end then it can cause a similar symptom to backlash (often compressing & slipping past next ring), other problems are a perforated diaphram, that too can cause problems these springs are quite brittle, although you think 20 to 120 psi would not break the spring the constant movement of PID will. worth a look, but the age of that valve probably have problems finding a new spring.

The control output only changes due to the pressure changing in the the pressure vessel. Those pressure changes might be caused by changes in the feed tank upstream of the pump, but the PID controller knows nothing about that and can only react to changes in the measured pressure.Some interesting changes in the control output which do correspond to small changes in the tank (not the pressure vessel) level (where the pressure pump supplies pressure from).
No, it does not indicate an unstable PID.Seeing a bit of oscillation in the output and process variable, does this indicate an unstable PID?
This is a capture from the same pressure cycle as above, so same settings. Seeing a bit of oscillation in the output and process variable, does this indicate an unstable PID?




