
Matthis
Member

Hello guys,
I am new to this forum and have some problems with my PowerFlex755 EENET frequency inverter.
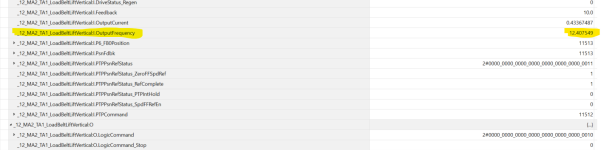
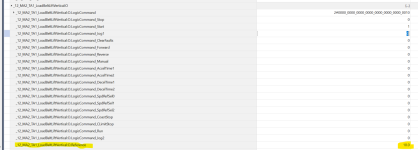
I want to do a point to point positioning task but my problem before I can have a look at the point to point positioning is, that the inverter is always running with 5Hz as soon as I give the start command. Even if I write 0.0 to the reference the output frequency is about 5 Hz. When I change my reference speed to 10.0Hz the output frequency is 12.X (see attached screenshots). . I thought that maybe a min frequency of 5Hz was set somehow, but I couldn't find a parameter and that wouldn't explain why I have 12.X Hz as the output frequency with a setpoint of 10Hz. --> see attached screenshots
And an other question, have someone experience with positining tasks with a PowerFlex755 and Point to Point positioning? I think in the first step it is not working because of the problem I described above, but maybe someone have a programming example or could tell me where I can find some information about how to use the Point to Point positioning?
Thank you for advice!
I am new to this forum and have some problems with my PowerFlex755 EENET frequency inverter.
I want to do a point to point positioning task but my problem before I can have a look at the point to point positioning is, that the inverter is always running with 5Hz as soon as I give the start command. Even if I write 0.0 to the reference the output frequency is about 5 Hz. When I change my reference speed to 10.0Hz the output frequency is 12.X (see attached screenshots). . I thought that maybe a min frequency of 5Hz was set somehow, but I couldn't find a parameter and that wouldn't explain why I have 12.X Hz as the output frequency with a setpoint of 10Hz. --> see attached screenshots
And an other question, have someone experience with positining tasks with a PowerFlex755 and Point to Point positioning? I think in the first step it is not working because of the problem I described above, but maybe someone have a programming example or could tell me where I can find some information about how to use the Point to Point positioning?
Thank you for advice!



")