Hi, Peter,
I had never heard of PLC Open before this, I would love to not have to re-invent the wheel with jerk motion. However, it looks like not every PLC has the PLC Open Motion libraries? Unless there is a way I can "download" the libraries? Basically I am not sure how to access the PLC Open libraries for my controller?
For acceleration & velocity & position reaching 0 together, what are some tricks? I am having a hard time thinking of some.
Did you look at this?
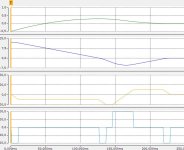
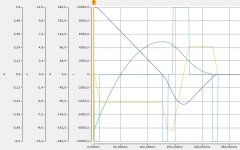
https://deltamotion.com/peter/wxMaxima/Seg1234567.html
Notice the round off error for t07 at %t111. You must use 64 bit math for starters. The RMC75, RMC150 and RMC200 can do 64 bit, LREAL, floating point math. This is a must even if the PLC can only use REALs.
Even then the rounding errors will lead to a loss of precision because all the different segments errors will add up unless you do what I did in the link. Notice I calculate the beginning and end of the segments using the formals. This helps keep the errors from accumulating if you keep adding one segment to the other.
This is not only hard. It is very hard. You need to learn to do symbolic processing as shown in the link. Iterating calculations and adding one millisecond's calculations to the next millisecond's calculations will NOT work.
Lean to use a CAS ( computer algebra system ). My example was done using wxMaxima. Others are Mathematica, Maple and Mathcad. I did most of my work in Mathcad. The link above shows how it can solve 17 variables using 17 equations.
Basically, I think you are nuts trying to figure this out. I have no idea why cheeco did it. I have no idea how optimal cheeco's solution is. I think cheeco wanted to sell the solution. I did it because my company sells motion controllers so I could justify the time in order to be perfect. It is easier to buy the motion controllers. Obviously were are NOT going to give the solution away.
BTW, I haven't seen any other controllers that can find the perfect or optimal solutions.
I repeat. Solving the problem in thread is not only difficult. It is extremely difficult to get perfect solution. It took me years before I got a solution I though was fast enough and I liked. Cheeco admitted to me that he too got frustrated and had to put the problem down of a year.
Years ago I posted this problem on sci.math.symbolic, an old news group. People could solve this problem using wxMaxima, Mathematica or Fermat. Robert Lewis of Fordham university used the problem at a lecture or seminar to show how good his program, Fermat, is. Even so NONE of them could provide a solution simple enough to use in a motion controller. The solutions were too complicated and would take too much time.
The complications led to rounding errors.
I finally took the time to simplify and optimize the solutions by hand. Yes, by hand. A big part of the problem is that there was a need to calculate the forth root of a polynomial. The computer can find the answer to all four roots but I realized I only needed one. This reduced the problem by a factor of 4 and yes, I have a method of finding the fourth roots using a formula. After a while you learn there are patterns to roots.
Learn to put polynomials in Horner form. A 3rd order polynomial is
s(t)=A+B*t+C*t^2+D*t^3
but write it like this
s(t)=(((D*t+C)*t+B)*t+A This is Horner form.
Notice there are no t^3 in the expression. If t is small then t^3 is so small that it is lost due to not having enough bits in the mantissa.
Again, so far only cheeco and I have solve the special case in this thread. There are about 50 of them. Notice I call my example seg1234567. This is a basic move. There is also seg123457. This trajectory doesn't have the middle constant velocity segment #4. My link shows one of the simplest cases.
Notice also, no one has challenged my claim after so many years. Anybody interested in this topic would have found this thread by searching the internet. There aren't many threads on this topic so this one would be easy to find.
BTW, just think of what the great mathematicians could do like Euler, Laplace, Fourier, Ramanujan, Gauss, Lebnitz, Newton, Riemann etc if they had the symbolic software and computing power we have today? The could do wonders if they didn't use the computers to waste time playing video games.
Time for a game of Starcraft.




")